
PROMENADE AUTOUR DE LA MISE AU POINT ( MAP)
EN ASTROPHOTOGRAPHIE
Mettre au point (focaliser) consiste à placer le capteur numérique au foyer de l’instrument : Endroit ou convergent les rayons lumineux issus d’un même point du ciel.
En photographie traditionnelle, la fonction : Autofocus (AF) d’un Appareil Photo Numérique (APN) détermine la bonne mise au point. Il y a, une liaison électrique entre le boitier et l’objectif. Cependant pour une photo de constellations, de la voie Lactée, de rencontres planétaires, de circumpolaires….faite avec l’objectif de l’APN, il faudra le plus souvent faire la MAP en manuel (MF) car l’autofocus ne fonctionne pas ou est peu fiable.
La meilleure façon pour faire cette MAP, est de repérer de jour la position « infini » avec la focale qui sera utilisée le soir en visant un paysage le plus lointain possible, et le moment venu, repositionner sur l’objectif la bonne focale et la bague de réglage des distances , ceci en position (MF) . Même si l’objectif possède le repère infini « ∞ », la méthode citée précédemment donne par expérience de meilleurs résultats.
En Astrophotographie, avec une lunette ou un télescope, la liaison APN – instrument, se fait mécaniquement par l’intermédiaire d’une bague dite « T2 « , l’autofocus est donc inopérant. (Ne pas oublier d’afficher MF sur l’APN).
Il faut savoir, qu’un filtre situé après la sortie de l’instrument, juste devant l’APN, « recule » le foyer d’une valeur voisine du 1/3 de l’épaisseur du filtre.
La suppression du filtre infrarouge attenant au capteur de l’APN, modifie également la MAP.
Toutes ces particularités font que l’image vue dans le viseur de l’APN (retransmise par l’intermédiaire du miroir) ne serra pas identique à celle présente sur le capteur donc il faut visualiser l’image du dit capteur.
La MAP est elle la même pour tous les objets du ciel, ceux-ci étant à des distances différentes ?
Par exemple, pour la Lune à 380000km de la terre et un objet situé à des centaines voire des milliers d’années lumières. A savoir, qu’au foyer d’un instrument de 1 mètre de focale, la différence est de l’ordre du milliardième de mm , donc….Pour la Lune, si il y a une différence entre le limbe et le centre ,c’est une question de couverture de champ.
La tolérance de MAP
Il existe un « intervalle » à l’intérieur duquel, la MAP est satisfaisante avant ou après la « bonne position ». Le rapport F/D est le principal paramètre qui influence la longueur de cette plage de netteté. Un instrument avec un rapport F/D à 5 est 4 fois moins tolérant qu’un F/D à 10, et 16 fois moins qu’un F/D à 20.
Une formule propose de calculer cet intervalle…
L = ± 8(F/D)² Δλ
Par exemple, pour une erreur de 1/4λ (λ=0,56µm) à F/D 10, L vaut ± 0,1mm.
Pour le ciel profond, on considère que cette tolérance peut être doublée.
Dans la littérature : » Astrophotographie de Thierry Legault », on peut lire :
Précision
Rapport F/D Très bonne Correcte Médiocre
6 ± 0,04mm ± 0,08mm ± 0,16mm
8 ± 0,08mm ± 0,14mm ± 0,3mm
10 ± 0,12mm ± 0,2mm ± 0,4mm
Tout ceci reste de la théorie……………
Les systèmes de MAP.
La crémaillère pour les lunettes et les télescopes de Newton.
Le déplacement du miroir primaire pour les télescopes de la famille Cassegrain.
La motorisation de l’oculaire, évite les vibrations lors de la MAP, une plus grande souplesse de manipulation car l’utilisateur n’intervient pas manuellement sur le mécanisme, et surtout, il n’y a pas nécessité à bloquer rigoureusement la crémaillère pour éviter tout recule de l’APN, du moment que le moteur reste alimenté.
Les aides à la MAP.
La fonction « Visée par l’écran « avec la fonction zoom facilite la MAP ( NB : Une option intéressante pour un APN, est de disposer d’un écran orientable ). Même si l’image est visualisée sur l’écran de l’ordinateur, nous aurons tout au plus une bonne approche de la MAP et il faudra effectuer plusieurs prises de vues et les comparer entre elles pour déterminer la bonne MAP. Par exemple en utilisant pour les APN canon: EOS Viewer Utility , Digital Photo Professional, avec APN Focus.
Cette visualisation pratiquement en instantané sur l’ordinateur, est par contre utilisée en cas de prises de vues avec une WEBCAM.
Un viseur d’angle avec la fonction x2, sera aussi une bonne approche pour faire la MAP.
Techniques de MAP.
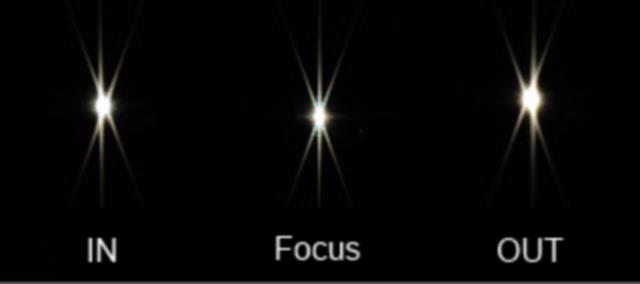
La méthode dite des AIGRETTES.

Deux fils rigides et polis placés à angles droits devant l’ouverture de la lunette, dessineront une étoile très fine à quatre branches avec diffraction de la lumière quand la MAP semblera correcte pour l’utilisateur. A savoir que sur un télescope la fixation du miroir secondaire fait office d’aigrettes. (Araignée).
Le masque de HARTMAN.
Se présente sous la forme d’un disque opaque du diamètre de l’instrument percé de trois trous à 120° d’égale distance et de petit diamètre. Le trou central permet d’accéder aux vis de collimation du miroir secondaire si cette méthode est utilisée avec un télescope.[/span8]
[span4]
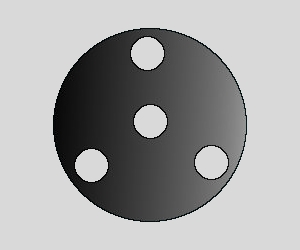
Viser une étoile , quand la MAP est incorrecte on apercoit trois étoiles . Quand la MAP est correcte, les trois étoiles convergent pour en former qu’une seule .

NB : ce système peut servir également à la collimation d’un télescope.
Le Masque de BAHTINOV.

Comme précédemment, se présente sous la forme d’un disque adapté au diamètre de l’instrument. Il est muni de fentes judicieusement tracées.[/span8]
Viser une étoile, quand la MAP semble correcte pour l’utilisateur on aperçoit l’image comme ici.[/span8]
Les aides Eos Viewer Utility, Digital Photo Pro, et APN Focus seront également utilisées pour ces trois solutions.
Ces trois méthodes ont chacune leurs adeptes qui ne manquent pas d’apporter des améliorations. Cependant il faut bien noter que ces aides à la MAP se résument à une appréciation purement visuelle de l’utilisateur en observant son écran d’ordinateur.
Il y a une autre méthode qui ne fait pas appel à la sensibilité visuelle, c’est la méthode dite :
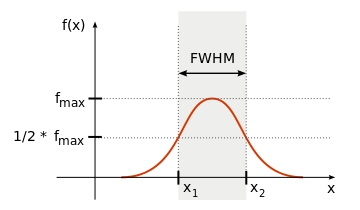
FWHM ( Full Widh at Half Maximum ) .
Que l’on peut traduire par : Valeur maximale et largeur à mi-hauteur.
L’image d’une étoile peut se représenter sous la forme de la courbe de couleur rouge plus ou moins fine, des logiciels peuvent calculer la valeur maximale et la largeur à mi-hauteur . Plus les valeurs sont faibles, meilleure est la MAP.
Le logiciel IRIS bien connu des Astrophotographes permet un affichage de la « FWHM » (Astrophotographie de T Legault)

Dans l’image de M51 définir un petit rectangle autour d’une étoile. Pour cela glisser avec la souris en maintenant le bouton gauche enfoncé. Le rectangle doit être suffisamment grand pour englober tout le signal de l’étoile, mais pas bien plus grand pour éviter d’inclure dans le calcul le signal d’étoiles voisines. Si la forme du rectangle ne vous convient pas vous pouvez recommencer l’opération.
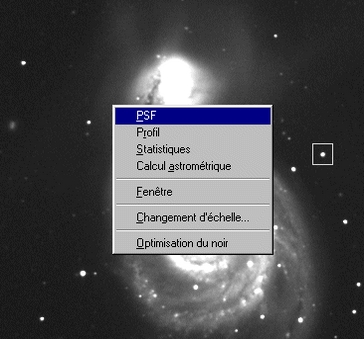
Appeler le menu contextuel en faisant un clic droit dans l’image. Lancer la commande PSF (pour Point Spread Function, ou fonction d’étalement en français).
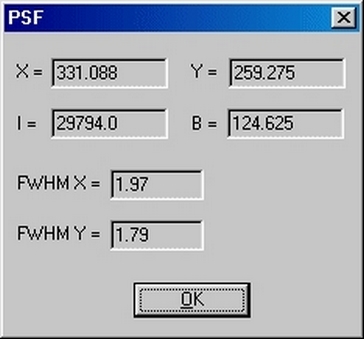
Iris ouvre alors une fenêtre dans laquelle s’affichent des paramètres concernant l’étoile sélectionnée.
an style= »color: #333333; »>Une autre possibilité peut être moins rigoureuse, est de télécharger un petit logiciel gratuit qui affiche un cartouche. Il suffit de placer la souris sur une étoile, et on peut lire la « FWHM » en chiffre rouge. Bien sur, il faut toujours lire la même étoile. Cette aide est à récupérer ici :
La FWHM ne dépend pas spécialement de la luminosité d’une étoile mais de sa saturation, et cette méthode apparait comme la plus précise.
Il y a un autre facteur qui « influence » la MAP : C’est la variation de la température entre le début et la fin de la séance de prise de vues. A savoir, que la dilatation d’un tube d’aluminium d’une longueur de 1 mètre pour 1° est de 23µm. Sans tomber dans l’excès, cela est certainement un facteur à prendre en compte .
Pour accélérer la MAP , il peut être avantageux de mesurer la position d’un élément mobile de la crémaillère lors d’une MAP correcte, antérieure, et de reporter cette mesure la séance suivante. Ce report peut se faire avec l’utilisation d’une « pige » ou d’un pied à coulisse.
Autre astuce : Quand plusieurs images ont été prises à diverses positions de la crémaillère de mise au point, l’installation d’un comparateur mesurant le 1/100mm permet de retrouver la bonne position de la crémaillère. (Astrophotographie de Thierry Legault , page 53 ).
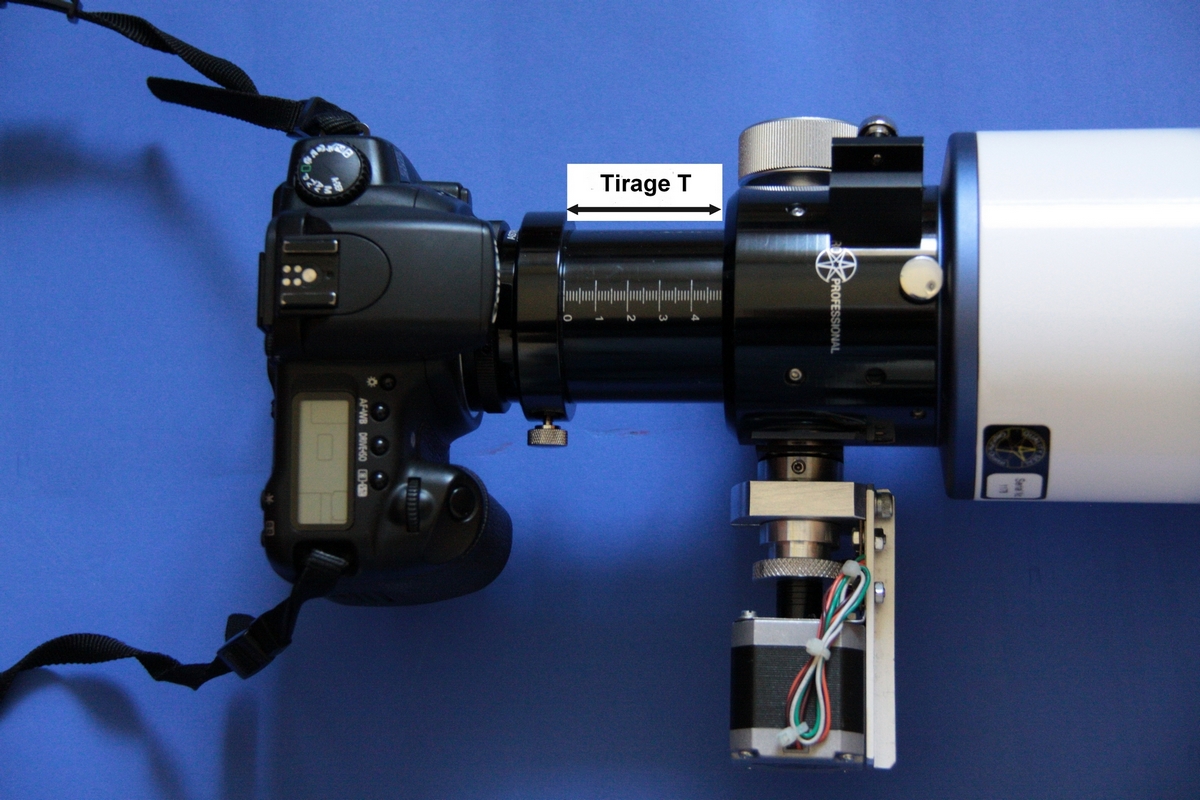
Ci-dessous une application de la FWHM avec Iris et un focuseur développé avec l’aide de Jacques Plichon, membre de Jalle Astronomie.
Tout d’abord, il faut, à la fin d’une séance précédente, noter la valeur de la dimension « T » qui représente le tirage du porte oculaire, bien évidement avec la meilleure MAP. Prenons par exemple 50mm.
Ouvrir IRIS. Au début d’une nouvelle séance d’astrophotographie, nous affichons : 49,5mm comme tirage de l’oculaire. L’APN réglé en RAW, 800 ISO, temps de pose 2s, ouvrir un fichier appelé : MAP 51 pourquoi pas. A partir de maintenant, il faut prendre une série de poses, qui peuvent être faites à partir de la dernière étoile d’alignement ou de l’objet choisi, pourvu qu’il y ait des étoiles au centre ou à proximité. Chacune de ces poses est prise après avoir déplacé l’oculaire d’une valeur constante, et à la fin, ne surtout pas actionner l’oculaire (nous verrons plus tard comment réaliser ces valeurs constantes) par exemple 0,05mm, pour atteindre un tirage d’au moins 50,5mm.
Donc, toutes nos photos sont dans le fichier MAP 51.
Fichier — Réglages — Chemin du répertoire de travail, et, dans la liste déroulante cliquer sur MAP 51 et OK.
Ouvrir l’outil APN et sélectionner le type d’APN puis OK.
Ouvrir Photo numérique — sélectionner : décodage des fichiers RAW — Ouvrir MAP 51 — Glisser les images (Exp 11 images) vers la fenêtre — donner un nom: m — Cliquer CFA, et attendre la fin du traitement.
Maintenant, il faut tracer un carré (à l’aide de la souris) autour d’une étoile située au voisinage du centre de l’écran, on va dire de 1cm de coté environ.
On lance la commande : >track( )m( )11 puis Entrée.
( )espace
Il faut maintenant retourner dans le dossier MAP 51, et ouvrir « stat.dat » On obtient : par exemple le tableau suivant.
|
A |
B |
C |
D |
E |
F |
G |
H |
I |
|
1 |
8.40 |
236853.6 |
118.3 |
|||||
|
2 |
-0.221 |
0.312 |
1654.790 |
1146.075 |
5,96 |
6,37 |
177858.3 |
155.1 |
|
3 |
0.747 |
-0.050 |
1653.821 |
1146.438 |
5,17 |
5,51 |
158146.9 |
136.4 |
|
4 |
-0.929 |
-0.928 |
1655.497 |
1147.315 |
4,39 |
5,19 |
135810.3 |
119.1 |
|
5 |
-3.079 |
-2.500 |
1657.647 |
1148.887 |
3,9 |
5,16 |
125902.2 |
135.8 |
|
6 |
-5.900 |
-3.091 |
1660.469 |
1149.479 |
4,43 |
5,36 |
134531.4 |
140.0 |
|
7 |
-6.182 |
-2.147 |
1660.751 |
1148.534 |
4,39 |
5,38 |
145026.3 |
204.3 |
|
8 |
-5.365 |
-0.068 |
1659.934 |
1146.455 |
5,17 |
5,76 |
26481.9 |
149.0 |
|
9 |
-5.289 |
0.181 |
1659.858 |
1146.206 |
6,79 |
7,19 |
125910.9 |
186.7 |
|
10 |
-6.447 |
-0.826 |
1661.015 |
1147.213 |
8,45 |
8,09 |
74913.9 |
202.8 |
|
11 |
-6.054 |
0.529 |
1660.622 |
1145.858 |
8,56 |
9,18 |
21204.0 |
160.4 |
Décodage :
A gauche, colonne A, le numéro des photos de 1 à 11.
Ensuite sans entrer dans les détails, on cherche dans les colonnes F et G, respectivement FWMH (x) et FWMH (y) les chiffres les plus petits : 3,90 et 5,16 qui correspondent à la photo N° 5 laquelle est théoriquement celle qui a la meilleure MAP.
Comme à la fin des prises de vues nous n’avons pas actionné l’oculaire, il suffit de revenir « en arrière » sur la photo N°5 de 6 fois le déplacement fait entre chaque pose.
Comment réaliser les déplacements constants.
Nous savons que pour une lunette, il faut mesurer « T », mais pour un télescope il suffira de ne pas actionner le réglage de la MAP à la fin de la séance.
LUNETTE :
Si l’instrument est équipé d’une motorisation de l’oculaire il faudra se déplacer d’un nombre égal « d’impulsions » entre chaque pose par exemple 30 et donc de compter 6×30=180 impulsions pour revenir à la photo N°5.
Ce déplacement peut être mesuré avec précision en installant un comparateur gradué.

TELESCOPE :
Pour ce type de télescope, par exemple, il faudrait fixer, dessiner, autocoller…de petits repères sur le tube ainsi que sur le bouton de réglage de la MAP, et compter le nombre de déplacements….</s

[/span4][/row]
Nous voici arrivés à la fin de notre « promenade », j’espère que ces quelques renseignements vous aiderons, et nous serrons toujours à votre disposition pour de plus amples concertations.
A bientôt ….sur le terrain
Pour en savoir plus :
ASTROPHOTOGRAPHIE de Thierry Legault Edition : EYROLLES
LA PHOTO DU CIEL de jour comme de nuit de Patrick Lécureuil Edition : PEARSON
PHOTOGRAPHIER LE CIEL EN NUMERIQUE Patrick Lécureuil Edition : VUIBERT